Hemav Planner¶
O que é Hemav Planner?¶
HEMAV Planner es la herramienta para la planificación, configuración, seguimiento y análisis del vuelo del UAV. Actualmente el SW de control HEMAV Planner (HP), tiene soporte para las plataformas de vuelo HAR8, HAR9, HP2 (configuración bungee y catapulta) y HP2k.
Requisitos Mínimos do Sistema¶
Intel core i3 ou similar 4GB de RAM Windows 7, 8 ou 10 Mínimo 700MB deespaço Adobe Reader instalado
Índice¶
Telas do Hemav Planner¶
Flight Data – Dados de voo
Botões laterais
Informações de voo e avisos
Informações de voo
Avisos e alertas (canto direito)
Mapa
HUD
Flight plan – Plano de voo¶
Menu lateral
Informações geográficas
Edição de waypoints
Ações do mapa (clique direito)
Configuração¶
Calibração de bússula
Calibração de acelerômetros
Nivelamento acelerômetros
Comparar parâmetros
Escrever parâmetros
Salvar em arquivo
Image Check
Baixar logs internos
Simulação¶
Níveis de bateria¶
GeoValla “FenceZone”¶
Update¶
Telas do Hemav Planner¶
A primeira janela que encontramos ao iniciar o programa é a telaseleção de plataforma”

O funcionamento do programa depende da plataforma escolhida. Somenteno caso da asa fixa HP2 é que será dada a opção de uma catapulta ou bungee”
Depois que a plataforma é selecionada, o programa é dividido em trêstelas principais:
Datos de vuelo: Seguimiento y control de la misión
Plan de vuelo: Planificación de la misión
Configuración: Modificar parámetros y calibraciones de las plataformas. Para acceder a cada una de estas pantallas, lo haremos a través del menú superior.

Flight Data – Dados de voo¶
Flight Data é a tela destinada à operação de voo em campo”Inclui o check list preflight, o monitoramento da missão durante ovoo, a execução de ações de controle (iniciar missão, retornar àcasa, pouso de emergência, etc.), as informações essenciais durante o voo eos avisos. A seguir, estão detalhados os botões e os campos deinformações desta tela.
Botões laterais¶
Auto: modifica o modo de voo para automático.
ARM/Decolagem: realiza o acionamento dos motores no caso do HAR8 eHAR9. Deixa a plataforma em espera de ser lançada no caso do HP2 eHP2K.
Estabelecer WP: permite enviar a plataforma a outro WayPoint diferentedo atual.
Limpar rota: limpe os passos e fotografias feitas datela.
Loiter: modifique o modo de voo para Loiter. Podemos escolher entremanter a altura ou baixar para 50m. O drone mantém a altura do voo e permanece estático no ponto, quando se aciona o botão. No caso de asafixa, dá voltas em torno do ponto em que o Loiter foi ativado.
RTL: modifica o modo de voo para RTL (return to launch / retornar ao lançamento).
Parar fotos: deixa de fazer capturas fotográficas. (HAR8 y HAR9)
Iniciar fotos: volta a fazer capturas fotográficas. (HAR8 y HAR9)
Desarmar: modifica o estado para desarmado e cessa os motores.
Pouso de emergência: ativa o modo voo “Pouso de emergência” e ativa oparaquedas para realizar o pouso de emergência”

Informações de voo e avisos¶
Temos duas áreas de informação, lado esquerdo (fundo verde) ondeas informações essenciais são exibidas em tempo real e o bloco suspenso da direita, onde se indicam os possíveis avisos e alertas para seconsiderar. Informações de voo:
Voltagem da bateria: exceto o HAR8, todas as plataformas dãoinformações de voltagem da bateria. [Volts]
Distância para o WP: distância restante até o próximo waypoint. [Metros]
Tempo de voo: tempo total de voo desde a decolagem. [Segundos]
Altura: altura em que a plataforma está em relação aoponto de decolagem. [metros]
Próximo WP: mostra o identificador do próximo waypoint. [númerointeiro]
GS: velocidade relativa ao solo (ground speed). [metros/segundo] AS: velocidade relativa ao ar (air speed). [metros/segundo]
Modo de voo: indica o modo de voo (Auto, Loiter, RTL, …)
Estado: indica se a plataforma está em um estado armado (‘armed’) ou desarmado (‘disarmed’).
Autopan: nos permite decidir se o mapa se centraliza automaticamente quando aplataforma está em movimento.
Direção do vento: velocidade e direção do vento [metros/segundo]Nesta mesma coluna, temos o botão dos requisitos do pré-voo emensagens.
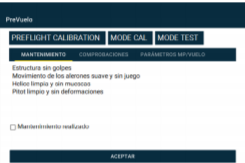
Pré-voo: indica as verificações que teremos que fazer naplataforma. É necessário revisar e clicar na caixa de verificação decada seção.
MODE CAL (HP2 e HP2K): modifica o modo de voo para manual, a fim derealizar as calibrações sem que os servos da asa trabalhem.
MODE TEST (HP2 e HP2K): modifica o estado do voo para STABILIZE, com o intuito de poder comprovar o bom funcionamento dos servos da asa.
PREFLIGHT CALIBRATION: sirve para calibrar el PITOT del HP2 y HP2k. Al finalizar, presionar aceptar.
Mensagens: nesta janela pop-up (emergente), todas as mensagens são exibidastanto as do programa quanto as recebidas da plataforma. É aconselhávelmantê-la aberta durante o voo.
Avisos e alertas (canto direito)¶
Inicialmente, esta janela está oculta mostrando apenas uma seta.No caso de receber algum aviso importante, será aberta uma guialateral, onde veremos o erro ou problema em vermelho. Não poderemos fechá-la atéque o erro tenha sido resolvido. Se pressionarmos a seta, será aberta uma janela,onde se indica:
Qualidade do sinal GPS
Vibração do drone(VIBE) – permite abrir uma janela com mais informações
Estado EKF (Erros dos sensores do drone)– permite abrir uma janela com mais informações
Número de capturas fotográficas
Número de satélites GPS disponíveis
HDOP: Indica a precisão do GPS na horizontal. Sempre devemos verificar se o número exibido é menor que 2.
Se houver algum alerta adicional, ele se mostrará aqui em vermelho. São adicionadasanotações adicionais na parte inferior.
Mapa¶
Mapa baseado nos Google Maps. Para aumentar e diminuir o zoom, podemosmexer na roda do mouse ou se estivermos usando um laptop, deslizamos dois dedos no touchpad. Com o botão direito, podemos realizara ação de “Trigger camera NOW”, que fará uma captura fotográficaextra.
HUD¶
Na parte central inferior, temos um HUD simplificado que indica a rotação e a inclinação da plataforma por meio do horizonte artificialem graus.
Flight plan – Plano de voo¶
Na tela de “plano de voo”, podemos planejar a missão. Pode-seplanejar manualmente ou com a ajuda do programa com base em um polígonodesenhado em cima de um talhão.
Menu lateral¶
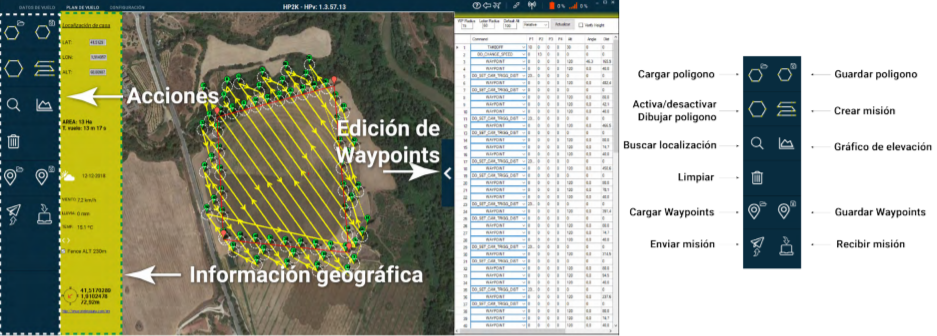
Neste menu encontraremos as principais ações para planejar uma missão.
Guardar polígono: una vez dibujado el polígono, podemos guardar un archivo .poly para poder cagarlo en futuras misiones.
Cargar polígono: podemos cargar un archivo .poly con un polígono. Solo se puede tener un polígono activo, si cargamos un polígono, se borrará el que tenemos en pantalla.
Activar/desactivar dibujar polígono: con esta herramienta conmutamos entre dibujar poligono y añadir WayPoints.


Crear misión: nos crea una misión automáticamente dentro del polígono dibujado. Nos abre el survey grid del mission Planner. No hace falta modificar nada, al escoger una plataforma al inicio, nos carga los datos básicos para un vuelo automático. En el caso de HP2 y HP2K hay que añadir la senda de ascenso y descendo en funcion de la dirección del viento.
Buscar localización: Podemos buscar una ciudad, pueblo o zona y nos centra el mapa en ella.
Gráfico de elevación: Una vez creada la misión, podemos ver una gráfica de comparación con los datos de elevación del terreno con los datos de elevación de la plataforma. Es importante recalcar que estos datos son extraídos de Google maps, por lo que son aproximado y solo pueden ser tomar como referencia. Recomendable realizar esta comprobación en todas las planificaciones.
Limpiar: podemos borrar el polígono, la misión o ambos.
Guardar WPS: podemos generar un archivo .waypoints o .txt con los datos de los waypoints.
Abrir WPS: podemos cargar archivo .waypoints o .txt con los datos de los waypoints.
Leer WPS: una vez conectada la plataforma al programa, podemos leer los WPS que el dron tiene en su memoria.
Escribir WPS: una vez conectada la plataforma al programa, podemos escribir los WPS en la memoria -del dron.
Informações geográficas¶
Na barra de informações geográficas, encontraremos:
Localização de casa: se a plataforma estiver conectada, podemosgeolocalizar o ponto de partida do voo.
Coordenadas de geolocalização da plataforma
Se houver um polígono desenhado, isso indica o tamanho em hectares
Se houver uma missão criada com a ferramenta automática, isso indica otempo estimado de voo. Atención: Se carregarmos uma missão diretamente com os WP criados anteriormente, não poderemos calcular esse tempo. Essas informações, são fornecidas somente ao criar o ‘survey grid’.
Informações meteorológicas da área. Nos permite ver as informaçõesmetereológicas do dia atual e os próximos quatro.
Fence ALT 230m: permite definir a altura máxima da plataforma em230m em vez dos 150m por padrão. Este parâmetro é salvo naplataforma ao escrever os WP.
Geolocalização do ponteiro (mouse)
Edição de waypoints¶
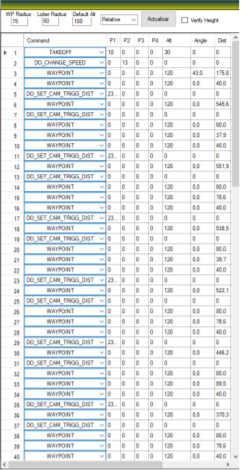
Depois que a missão é criada, podemos revisar e editar cada WP e seusparâmetros. Cada linha identifica um waypoint:
Numero: Identificador do waypoint
P1 – P4: parâmetros do comando. Exemplo: o comando DO_CHANGE_SPEED aceita em P2 o valor de velocidade em m/s.
Alt: altura pela qual a plataforma deve passar pelo waypoint.
Angle: diferença de altura com o próximo WP em graus (não pode ser editado)
Dist: distância em metros do próximo WP (não pode ser editado)
Delete: apagar a linha/waypoint.
Lat: latitude do waypoint. (coordenadas GEO)
Lon: longitud del waypoint. (coordenadas GEO) Una vez editados los WP, debemos apretar el botón de guardar. Despues de guardar, tenemos la opcion de actualizar los datos, por si vemos algún valor incorrecto, o hemos movido un waypoint des del mapa. Podemos borrar multiples WP a la vez con la tecla Suprimir.
Atención:no modificar los datos sin conocimientos de los parámetros usados en ArduPilot. Hemav Planner crea automáticamente los WPS y los parámetros necesarios para cada plataforma. Puedes consultar aquí la lista completa de comandos.
Ações do mapa (clique direito)¶
Ao clicar com o botão direito do mouse no mapa, temos:
Borrar WP: clic derecho encima de un waypoint para poder bórralo.
Insertar WP: nos permite insertar un WP después del WP deseado.
Auto WP: nos permite crear misiones tipo espiral, circunferencia, etc…
Map tool: permite modificar ciertos parámetros del mapa.
File load/Save: permite cargar datos al mapa como las
Set Home Here: permite definir el punto de inicio. Esto es útil para hacer simulaciones o planificar las misiones en campo antes de conectar la plataforma

Configuração¶
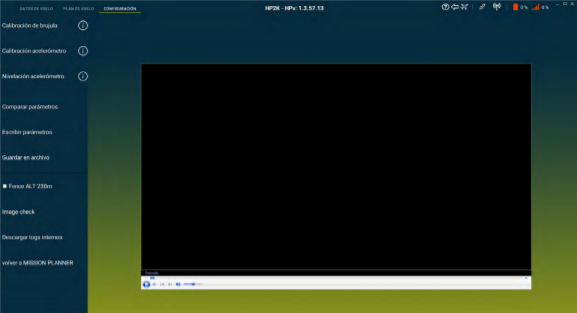
Na tela de configuração, podemos calibrar e carregar parâmetros paraa plataforma
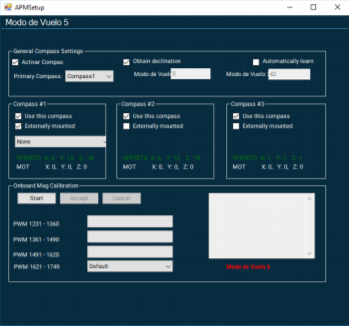
Calibração de bússula¶
Para calibrar la brújula, debemos usar los valores por defecto solo modificando el Fitness, que debe ser relaxed (si calibrando en default no calibra correctamente) y seleccionar el botón de start. Las 3 barras inferiores irán progresando hasta llegar al final. Durante la progresión de las barras, debemos orientar el dron primeramente sobre sus 6 ejes, los mismos del accel calibration, y posteriormente rotar 360º sobre cada uno de esos ejes. Una vez realizada la calibración, en caso de ser correcta, el dron emitirá tres pitidos ascendentes. En caso de ser errónea emitirá uno, o dos descendentes. Tras una calibración correcta es necesario reiniciar el dron.
Calibração de acelerômetros¶
Siga as instruções que aparecem na tela ao clicar e pressionar enter.
Nivelamento acelerômetros¶
Siga as instruções que aparecem na tela ao clicar.
Comparar parâmetros¶
Podemos carregar um arquivo de parâmetros para compará-lo e, se quisermosusá-lo na plataforma conectada.
Escrever parâmetros¶
Escrever parâmetros na plataforma conectada.
Salvar em arquivo¶
Criar e salvar arquivo de parâmetros.
Image Check¶
Esta herramienta nos permite hacer un
control visual de las imagenes y de las placas
de calibración capturadas con la Micasense
despues del vuelo.
Debemos cargar la carpeta superior de la
tarjeta SD, tipo 0001SET, es decir, la carpeta
que contiene todas las subcarpetas que
Micasense crea.
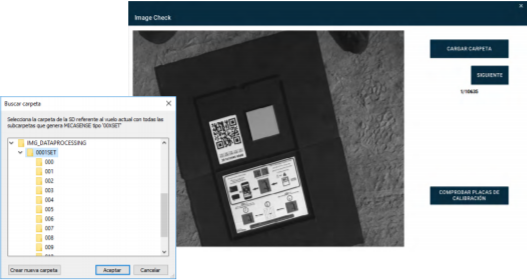
Depois que a pasta for carregada corretamente, podemos percorrer todo o image set (conjunto de imagens)com saltos de 5 imagens. É importante verificar que nas imagens nãoseja detectado o céu e partes da plataforma, como pés, cabos, etc. Com esta ferramenta também é possível ver se há nuvens em nossas imagens.
Mas abajo, encontramos el botón para hacer la comprovación de las placas de calibración. Esta herramienta nos indicará el numero de placas de calibración y su numero de serie. También nos informa en que parte del image set se encuentran.
Simulação¶
Finalmente, en el menú superior derecho encontraremos el botón de simulación (icono de avión).
Es muy útil esta herramienta para practicar planificaciones y vuelos ficticios.
El procedimiento es muy simple, debemos clicar encima del botón de la plataforma que queremos simular.
Previamente, puede ser recomendable subir el número de Sim Speed para acelerar las simulaciones. El resto de los
parámetros no son recomendables de modificar.
Una vez cargados los parámetros podemos cerrar la ventana de simulación.
Una vez estamos conectados al modelo simulado, desde la pestaña datos de vuelo y plan de vuelo interactuaremos
con el dron simulado como si de una plataforma verdadera se tratase.

Níveis de bateria¶
Uma maneira de controlar o nível da bateria é com o indicador devoltagem de bateria da tela de dados de voo, mas se não sesabe os valores máximos e mínimos de tensão, é melhor se guiar pelosdados de bateria que aparecem no canto superior direito. Estesindicadores da bateria contém em um ícone e um valor em percentual. O ícone indica, de acordo com a cor, a porcentagem restante:
 Icono verde si la batería restante es
mayor del 30%.
Icono verde si la batería restante es
mayor del 30%.
 Icono naranja si la batería restante se
encuentra entre el 30% y el 10%.
Icono naranja si la batería restante se
encuentra entre el 30% y el 10%.
 Icono rojo si la batería restante es
menor del 10%.
En este caso, la plataforma entrará
en modo RTL (HAR8 y HAR9) o DO_
LAND_START (HP2 y HP2K).
Icono rojo si la batería restante es
menor del 10%.
En este caso, la plataforma entrará
en modo RTL (HAR8 y HAR9) o DO_
LAND_START (HP2 y HP2K).
GeoValla “FenceZone”¶
No Hemav Planner, temos duas GeoVallas ou FenceZone. Uma cercainterior (circular) que indica a área segura para planejarnossa missão. Uma cerca externa (octogonal) que delimita a distânciamáxima em que nossa plataforma pode operar. Se a plataforma excedera cerca externa, entrará no modo RTL.
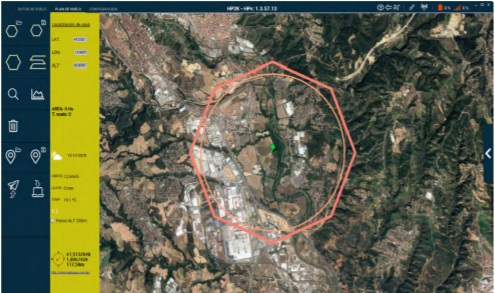
Los radios y alturas por defecto de estas vallas son distintos para cada plataforma. Se indican también los limites
inferior y superior de la propia valla.

Em todas as plataformas, a altura máxima padrão é de 150m.Lembre-se de que é possível aumentar essa altura para 230m no “PLANO DE VOO\”
Update¶
Ao abrir o aplicativo, se houver uma conexão com a internet, ele buscaráas atualizações automaticamente. Se houver uma versão mais recente, eleperguntará se queremos atualizar. Nesta janela, são indicadas asmudanças mais importantes da nova versão.
Se a conexão à Internet não estiver estável, é preferível não atualizar. Seoptarmos por atualizar a versão, o sistema começará a baixar osarquivos automaticamente. Quando esse processo estiver concluído, o aplicativoserá reiniciado automaticamente. Se em algum momento do processo surgiralgum erro, é possível que o aplicativo tenha sido corrompido porproblemas com a conexão do servidor. Nesse caso, será necessárioreinstalar o aplicativo.